Objectives
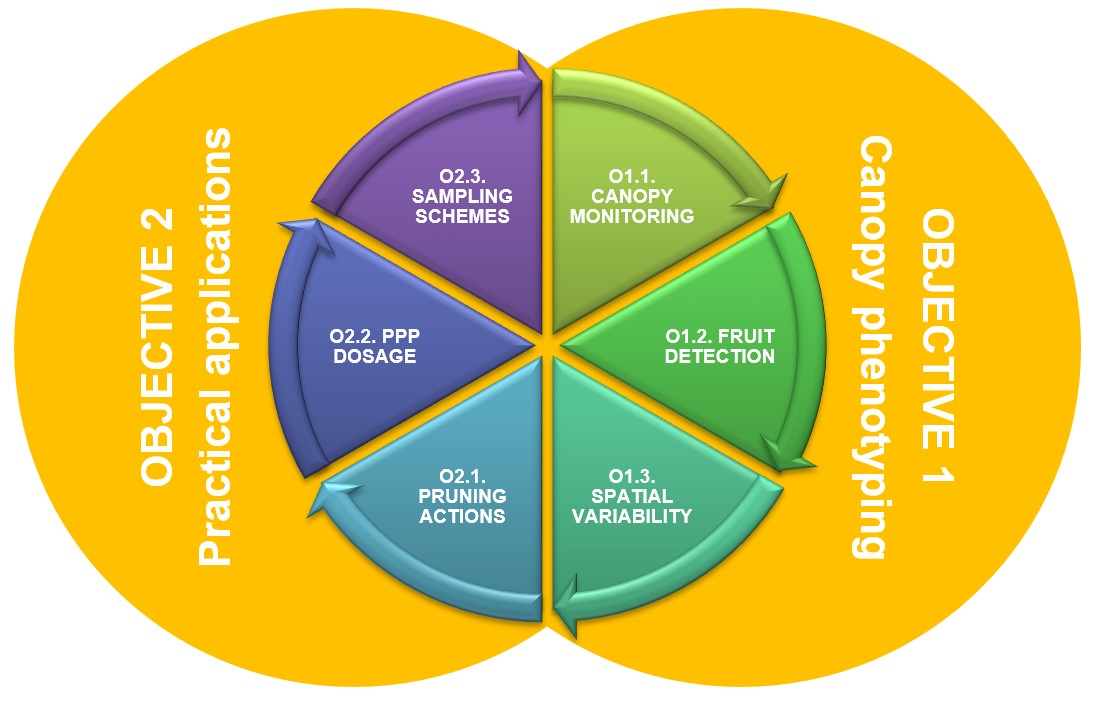
Download PdfObjective 1: Canopy phenotyping and spatial variability evaluation in fruit and vine orchards.
Canopy assessment based on crop phenotyping sensor-based systems covers a large part of Objective 1 tasks. Specifically, LiDAR sensors with improved capabilities, RGB and RGB-D cameras are going to be used to structurally characterize foliar architecture and canopy lighting conditions. Then, analysis of all those data in georeferenced point clouds at an individualized tree scale (or field experimental design) can provide fruit growers and managers with a very powerful tool to understand how sunlight interacts with the canopy. This knowledge is expected to be fundamental to decide on pruning methods in fruit species. On the other hand, multispectral cameras will also be used to measure canopy vigour status. These sensors, together with photogrammetric techniques, will be the basis for fruit detection (location and distribution). The results will be applied for yield efficient estimation in Objective 2. In parallel, scouting for canopy health status monitoring will be based on using some of the optical sensors already mentioned above for pests and diseases detection. Then, after mapping canopy parameters at plot scale, in-depth spatio-temporal analysis of maps will provide the information on which on-farm pruning experimentation, map-based dosing of pesticides and sampling tasks corresponding to Objective 2 will be based.
Objective 2: Practical application of canopy parameters and spatial information in pruning management, precise pesticide application, and efficient scouting and sampling for fruit orchards monitoring and yield estimation.
Objective 2 of the project will be developed based on the results obtained in parallel from Objective 1. Application of mechanical pruning experimental designs will allow effects on yield of this canopy management to be analysed and measured using the most appropriate sensors assessed in Objective 1. How to prune with higher or lower intensity can affect canopy lighting conditions and yield is of special interest in fruit growing. Map-based dosing of pesticides is another task to investigate. This will again require the information and zoning protocols developed in Objective 1. Moreover, site-specific applications will be assessed as a complementary practice to the early monitoring of pests and diseases. Finally, more efficient sampling methods than simple random sampling (SRS) will be evaluated by taking advantage of the information provided by crop monitoring sensors. Two methods are candidates for this research: stratified sampling and ranked-set sampling (RSS), the latter not assessed yet in fruit growing. The idea is to apply these sampling methods in yield estimation and dosing decisions in plots with spatially variable canopy distribution. For the three tasks planned under Objective 2, advanced data analysis will be used to extract practical recommendations in the three specified areas: pruning, pesticide application and sampling for yield estimation.